光斑位置探測模塊
一、 光斑位置探測器的探頭:CCD攝像頭
尺寸為30mm(長)X30mm(寬)X30mm(厚,含鏡頭長度),CCD感光芯片的尺寸為1/3英寸,品牌為SONY。裝有M12螺紋的小鏡頭,鏡頭型號為8mm 5MP。
CCD攝像頭的連線末端是一個3pin的端子,3個pin分別是地線(黑線)、12V供電(紅線)、模擬視頻信號輸出(黃線),與普通單板ccd的三線定義一樣。
二 、採集驅動電路板
板子尺寸為60mm(長)X49mm(寬)X25mm(高),包含3pin視頻輸入和12V CCD供電端口,RS232通信和供電插針(供4針)。此外電路板右側還留有直流電源插座焊接孔,可以焊接標準DC005座,用於給電路板供電。
RS232輸出的光斑位置數據的更新速度為25Hz。
三、 RS232串口通信及命令
RS232串口通信的電平為TTL或者3.3V電平,用戶可以用單片機、DSP等邏輯芯片的IO按照串口協議與之通信,也可以通過USB轉RS232(TTL電平)模塊用PC機與之通信,但不能用PC機自帶的RS232端口或者USB轉RS232(標準串口電平)模塊或者電纜線與之通信(因為電壓不匹配)。
此RS232串口的波特率:115200,
位數:8
停止位:1
校驗碼:N
具體命令請查看附帶的文本文檔。
四、測試軟件
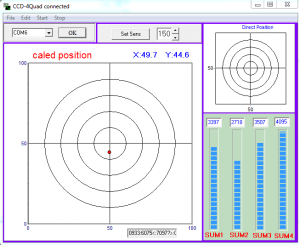
如圖所示,各部分的功能請查看附帶的文本文檔。
五、 BCB源代碼說明
查看所附文本文檔 。
六、基本原理和使用簡介
含有鏡頭的CCD攝像頭是成像設備,其AV端輸出的視頻信號是PAL制式,幀率為25幀/秒,這裡的CCD驅動闆對所輸入的視頻信號也進行25幀/秒的數據採集,每採集一幀視頻信號,都會對圖像數據進行預先處理,濾除其中的噪聲(比如CCD像素中等的亮點壞點),然後對把整個圖像的數據分為四部分,等同於四象限探測器的四個像限,這裡我們稱之為數字象限,把各象限內的像素數據分別求和,即可得到四個數字象限的強度,驅動板通過串口協議以字符串的形式把四個數字象限的強度發出,接收端(如上位機)在接收到這些字符串後,再分別換算出四個數字象限的強度,最後利用公式即可計算得到光斑在CCD感光面上的橫向和縱向的位置。
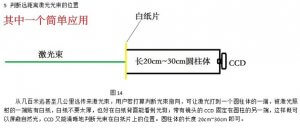
CCD攝像頭一般是配有M12的6mm口徑鏡頭使用的,假如用戶不想使用鏡頭,可把鏡頭直接旋轉下來,因為CCD感光芯片非常敏感,所以去掉鏡頭後,應在入光口粘貼光學衰減片或者把CCD放入暗室裡面,總之是要排除自然光或者燈光的影響。去掉鏡頭後,進入CCD的光(一般是激光)首先不要太強以免燒壞CCD芯片(一般打在手上沒感覺的激光對於CCD芯片才是安全的);再一個進入CCD的光的光斑尺寸要小於CCD感光面的尺寸方可,CCD的感光面的大小為6mmX5mm,因此盡可能使得進入CCD的光斑尺寸小於4mm,這樣位置測量才准確。在沒有鏡頭的情況下,因光斑是直接打在CCD感光面上的,這樣位置精度就受限於CCD像素的大小,所以位置測量的精度應該在10um量級。
在CCD攝像頭配有鏡頭的情況下,使用靈活性會得到極大的提高,首先無需對光斑強度進行專門衰減,因CCD極為敏感,而且攝像頭上的驅動板會根據光強大小自動調整快門時間,因此既可以用此數字四象限模塊定位白天天空中高亮度的太陽,也可以在夜空中定位柔弱的月亮位置;其次,無需對所要定位的光斑進行專門的光路調節,只要遠處的光斑的光強相對於周邊環境的自然光有較為明顯的對比度,讓攝像頭的鏡頭對著此光斑,旋轉一下攝像頭角度,假如軟件上的光點(在用上位機接收數據的情況下)隨之有規律的變動,那說明攝像頭已經追踪到此光斑,其它設備就可以根據驅動板輸出的位置信息作相應的處理操作了;再次,帶有鏡頭的CCD攝像頭,對CCD芯片的有很好的保護作用,只要光(主要是激光)不正對著鏡頭進入CCD感光面,而是通過鏡頭對遠處的光斑成像於CCD表面,這樣對CCD芯片是永遠不會有傷害的。
在使用此CCD數字四象限探測器定位光斑位置時,因CCD判斷的是光斑的重心位置,因此光斑的形狀不能總是改變,否則重心就會改變,這樣驅動板輸出光斑位置也會跳動(即使光斑位置實際沒有改變);還有,如激光打到遠處某個屏上,激光較強,在光斑的周邊也會產生相應的散射光,且也具有一定的強度的話,那用此位置探測器探測到的光斑位置不會是激光光點所在的位置,而是激光光點和周邊散射光共同作用形成的光強重心位置,這一點需要用戶注意。